2018-12-27 15:23
一、I/O分配 根据以上电动机计数循环正反转的控制要求可知:PLC的输入信号有停止按钮SB(X0)、启动按钮SB1 (X1)、热继电器常开触点FR (X2)。PLC的输出信号有正转接触器KM1 (Y1)、反转接触器KM2 (Y2)。定时用到定时器T0(正转3s)、T1(停2s)、T2(反转3s)、T3(停2s)。其I/O分配如图2-53所示。 一、硬件接线 主电路图与正反转
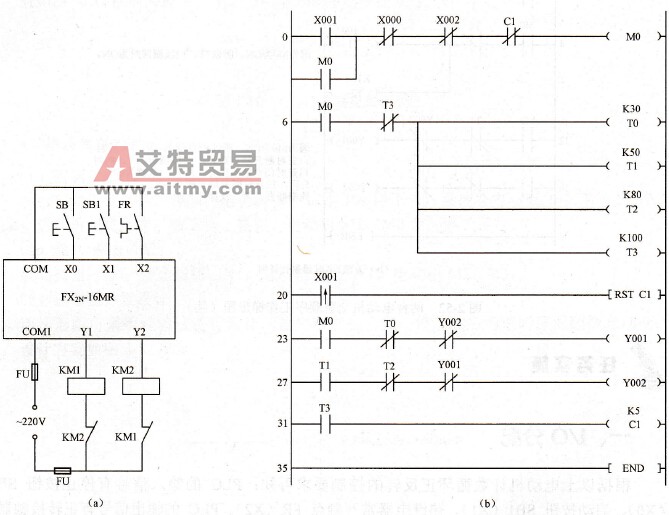
根据以上电动机计数循环正反转的控制要求可知:PLC的输入信号有停止按钮SB(X0)、启动按钮SB1 (X1)、热继电器常开触点FR (X2)。PLC的输出信号有正转接触器KM1 (Y1)、反转接触器KM2 (Y2)。定时用到定时器T0(正转3s)、T1(停2s)、T2(反转3s)、T3(停2s)。其I/O分配如图2-53所示。
本程序可采用经验法来编程。根据以上控制要求分析如下:该PLC控制是一个顺序控制,而控制的时间可用累积定时的方法,而循环控制可用振荡电路来实现,至于循环的次数,可用计数器来完成。另外,正转接触器KM1得电的条件为按下启动按钮SB1或T3时间到,正转接触器KM1失电的条件为T0时间到;反转接触器KM2得电的条件为T1延时到,反转接触器KM2失电的条件为T2时间到;按下停止按钮SB或热继电器FR动作或计数器C0次数到则整个系统停止工作。因此,整个设计可在启一保一停电路的基础上,再增加一个类似如图2-52的振荡电路和一个计数及复位电路来完成,其梯形图如图2-53 (b)所示。
用经验法设计梯形图时,没有一套固定的方法和步骤可以遵循,具有很大的试探性和随意性。修改某一局部电路时,可能对系统的其他部分产生意想不到的影响,另外,用经验法设计出的梯形图往往很难阅读,给系统的维修和改进带来了很大的困难。因此,对于复杂的控制系统,特别是复杂的顺序控制系统,一般采用步进顺控的编程方法。步进顺控设计法是一种先进的设计方法,很容易被初学者接受,对于有经验的工程师,也会提高设计的效率,并且程序的调试、修改和阅读也很方便。有关步进顺控的编程方法将在项目三中进行讲解。
按图2-53 (a)所示的PLC的I/O接线图正确连接好输入设备,进行PLC的模拟静态调试(按下启动按钮SB1时,Y1亮,3s后,Y1灭,2s后,Y2亮,再过3s,Y2灭,等待2s后,重新开始循环,完成5次循环后,自动停止;运行过程中,随时按下停止按钮SB时,整个过程停止;任何时间使FR动作,整个过程也立即停止),并通过计算机或手持编程器监视,观察其是否与指示一致,否则,检查并修改程序,直至输出指示正确。
按图2-53 (a)所示的PLC的I/O接线图正确连接好输出设备,进行系统的空载调试,观察交流接触器能否按控制要求动作(按下启动按钮SB1时,KM1闭合,3s后,KM1断开,2s后,KM2闭合,再过3s,KM2断开,等待2s后,重新开始循环,完成5次循环后,自动停止;运行过程中,随时按下停止按钮SB时,整个过程停止;任何时间使FR动作,整个过程也立即停止),并通过手持编程器或计算机进行监视,观察其是否与动作一致,否则,检查电路接线或修改程序,直至交流接触器能按控制要求动作;然后按图2-10所示的主电路接好电动机,进行带载动态调试。
动态调试正确后,测试指令的读出、删除、插入、修改、监视、定时器及计数器设定值的修改等操作。










